안녕하세요 어제는 전기차에 대해 알아봤는데 오늘은 앞으로의 기술 자율주행에 대해 알려드리려고 합니다.흔히 드라마나 영화에서 꽤 등장한 기술이기도 합니다.하지만 이제 아닙니다.영화에서나 할 수 있었던 기술이 현실에도 등장했습니다.
출처 – http://auto.danawa.com/news/?TAB=A&Work=detail&no=4425520 자율주행의 개념은 생각보다 오래전에 만들어졌습니다. 1960년대 벤츠가 자율주행의 개념을 내놓았고 1970년대 중후반부터 연구가 시작되었다고 합니다. 1990년대 들어 컴퓨터 기술이 발전하면서 자율주행 분야가 본격적으로 연구되었습니다. 4차 산업혁명 기술인 사물인터넷(IOT), 빅데이터(Bigdata), 인공지능(AI), 클라우드(Mloud),
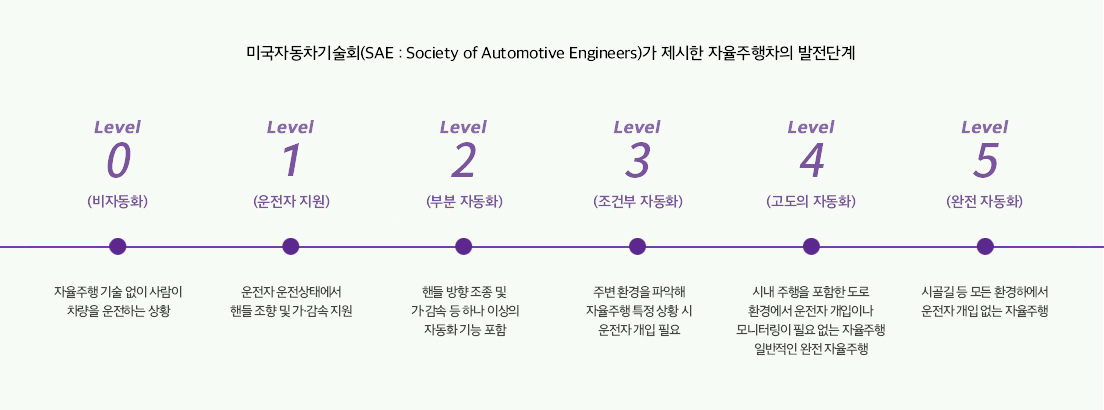
출처 – https://www.hyundai.co.kr/TechInnovation/Autonomous/Roadmap.hub 자율주행 시스템은 총 6단계로 나누어져 있습니다. 먼저 단순히 주행 중 시스템이 경고하는 전방 충돌 방지 보조, 후측방 충돌 경고가 0단계에 해당합니다.
그리고 주행 모드에서 감속, 가속 중 하나를 선택해 유지 보조, 스마트 크루즈 컨트롤을 가능하게 하는 것이 1단계에 속합니다.
특정 주행 모드에서 시스템이 감속, 가속을 모두 수행해 고속도로 주행 보조가 가능하도록 하는 것이 2단계입니다.
여기서부터가 중요하지만 구글에서 출시한 자율주행차도 3단계에 속합니다.시스템이 전체 주행을 담당하고 있습니다.차선을 변경하여 앞차를 추월할 수도 있고 장애물을 피할 수도 있습니다.
4단계는 3단계와 비슷합니다.4단계는 위험 발생 시에도 안전하게 대응할 수 있도록 주행 모드가 발전한 것이라고 합니다.현재 2021년 고속도로 자율주행이 가능한 3단계 자율주행차 개발이 이뤄졌고, 4단계 자율주행차 개발을 목표로 매진하고 있다고 합니다.자율주행의 원리에 대해 알아보겠습니다.기본 원리로는 크게 인식, 판단, 제어가 있습니다.인식 단계는 교통 상황이나 운행 환경 등 주변 정보를 파악하는 데 있습니다.주변 정보를 신속하고 정확하게 파악하여 적절한 제어를 수행할 수 있습니다.주변 정보는 GPS, 카메라, 레이더 등을 이용한다고 합니다.
다음은 판단 단계입니다.인식한 정보를 바탕으로 자동차 스스로 이상적인 결정을 내리고 주행 전략을 결정합니다.판단과 인식이 밀접하게 관련된 만큼 두 기술이 얼마나 조화를 이루느냐에 따라 완성도가 결정된다고 합니다.
마지막으로 제어 단계입니다.자동차 스스로 엔진을 구동하거나 주행 방향을 조정하는 등 사고 예방, 안전 운전을 합니다.자동차 스스로 속도와 방향 등을 조절하여 본격적으로 주행을 시작한다고 합니다.
출처 – 엔비디아 블로그 자율주행 기술이 발전하는 것은 좋지만 그만큼 단점도 생기기 마련입니다.그래서 장점과 단점을 알아보려고 하는데
우선 장점으로는 교통사고가 크게 감소한다고 합니다.자율주행에서 가장 기대되는 부분 중 하나라고 합니다. 운전자의 실수로 인한 사고를 크게 감소시킬 수 있다고 합니다.
또한 신체적인 이유로 운전이 어려운 교통약자를 위해 정전 접근이 용이해진다고 합니다.순간적으로 대처 능력이 떨어진 노인들을 위해서라도 운전에 어려움을 겪고 있는 분들도 도움을 받을 수 있다고 합니다.
그 다음 여가시간이 증가한다는 것입니다.자율주행으로 여유시간이 늘어난 만큼 차량 내 행동이 자유로워지고 통화와 업무 처리도 쉽다고 합니다.
그냥 좋은 기술이지만 단점도 빠뜨릴 수는 없죠?윤리적인 문제가 부각되고 있습니다.운전하는 차량에 갑자기 등장하는 행인을 감지하고 급정거해야 할 때 운전자와 행인 중 한 명이 다칠 수밖에 없는 상황이라면 누구를 돕기 위해 프로그래밍되어야 할까요?이런 부분도 놓을 수 없을 것 같아요.
또한 시스템 결함 또는 프로그램 해킹에 대한 문제점도 발생하고 있으나 완전한 보안이 없기 때문에 모든 컨트롤이 상실되고 큰 사고가 발생하거나 시스템 결함으로 급가속, 급발진 등이 문제가 될 수 있다고 합니다.오늘은 자율주행차에 대해 이야기했습니다.멀지 않은 미래로 다가올 기술이기 때문에 저희도 대비해야 할 것 같습니다.
이번 시간에는 트롤리 딜레마에 대해 알아보겠습니다.